步進電機驅動器操作原理及檢修
發布時間:2019-07-17 12:19:33來源:
1.1 步進電動機和步進驅動器的性能和作用概述
1、步進電動機的性能和工作方式
步進電機是將電脈沖信號轉化為角位移或線位移的一位電動元件,當步進驅動器每接收一個脈沖控制信號,即驅動步進電機按設定的方向轉動一個固定的角度(步距角),故稱為步進電機。非過載情況下,電機的轉速和停止位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響。利用這一線性關系,可以通過控制給定信號的脈沖個數來控制角位移量,從而達到準確定位的目的。同時可以控制脈沖頻率來控制電機的運轉速度,達到調速的目的。與普通電機相比,即具有調速性能,又具有較精確的定位功能,而且低速時的轉矩較大,調速范圍也更寬。
在速度和位置控制系統中,步進電機驅動系統具有運行可靠、結構簡單、成本低、維修方便等優點,其步距角不會因電壓、電流、溫度等因素而波動,可以做到快速啟動、反轉和制動。在機械制造、印刷、化工等工業控制領域的應用也極為廣泛。
1)兩相步進電機的結構和工作原理
目前常用的有兩相、三相、四相、五相步進電機。相數,是指電機內部的線圈組數,電機相數不同,其步距角也不同。下面以以兩相步進電機為例,對其結構和工作原理作一簡要說明。

圖1-1 二相步進電機結構與繞組電流回路圖
步距角為0.9/1.8,即整步為1.8°,半步為0.9°。一臺步進電機,相數(繞組數)是固定不變的,但可運行于二相四拍或二相八拍的兩種運行模式下。當運行于二相四拍模式下時,步矩角為1.8°,運行于二相八拍模式下時,步矩角為0.9°。當采用帶細分的步進驅動器時,其步矩角根據細分設定值而有更大范圍的變化。
步進電機的拍數:完成一個磁場周期變化所需要脈沖數(繞組導電狀態),指電機轉過一個齒距角
所需脈沖數。上圖為二相四拍運行模式下的繞組電流回路圖,K1-K4四只開關按一定次序通斷——若為基本步單激勵方式——任一時刻總是兩只開關閉合,只形成一相電流,則形成IAB→ICD→IBA→IDC按四拍規律變化的繞組電流;若為兩相激勵方式——同時形成兩相繞組電流,則形成IAB、ICD→IBA 、ICD→IBA、IDC→IAB、IDC按四拍規律變化的繞組電流。
如控制K1-K4開關按規律開通,使之形成按IAB→IAB、ICD→ICD→IBA→ICD→IBA→IAB、IDC→IDC→IAB、IDC按8拍變化的繞組電流,則可使步進電機工作于二相八拍的工作模式之下。實際的驅動電路——步進驅動器,即是將K1-K4換成了晶體管開關元件,控制其通斷規律,完成對步進電機的驅動任務。
步進電機須由步進驅動器(由電子電路構成)驅動,因而其工作模式和步矩角的大小,取決于步進電機驅動器的相關設置。
2)步進電機驅動器的基本參數和特性
a、供電電源,可據所驅動步進電機的電源規格進行選擇。交流電源供電的,如AC80V,可用220V市電經降壓變壓器,提供給驅動器。選用變壓器時,須同時考慮電壓和電流兩方面的工作參數。如電流值3A,由算式80V×3A=240VA得出的是視在功率值,達不到3A的實際輸出能力,應將計算結果再乘以1.5以上的系數,選用220/80V,400VA以上的變壓器,作為電源輸入。二相電機的供電一般為12~48V,
b、輸出電流值。產品標注值往往為峰能輸出能力,選用時,比較低應按步進電機額定電流值的2倍以上。
輸出電流的檔位,一般操作面板上的撥碼開關進行人工整定,如0.9A-3A。這也是一種過載保護整定,整定值可參考步進電機的工作電流值。一般有8級整定檔次。
c、勵磁方式:整步、半步、4細分、8細分、16細分、32細分、64細分。半步實際上是2細分,細分級別越高,步矩角越小,而電機轉速越低。步進驅動器的控制面板,也設有細分撥碼開關,也對細分值進行設置。
d、保持轉矩(HOLDING TORQUE):
是指步進電機通電但沒有轉動時,定子鎖住轉子的力矩。它是步進電機比較重要的參數之一,通常步進電機在低速時的力矩接近保持轉矩。由于步進電機的輸出力矩隨速度的增大而不斷衰減,輸出功率也隨速度的增大而變化,所以保持轉矩就成為了衡量步進電機比較重要的參數之一。比如,當人們說2N.m的步進電機,在沒有特殊說明的情況下是指保持轉矩為2N.m的步進電機。
2、步進驅動器的電路構成和工作原理
1)步進電動機驅動器的電路構成
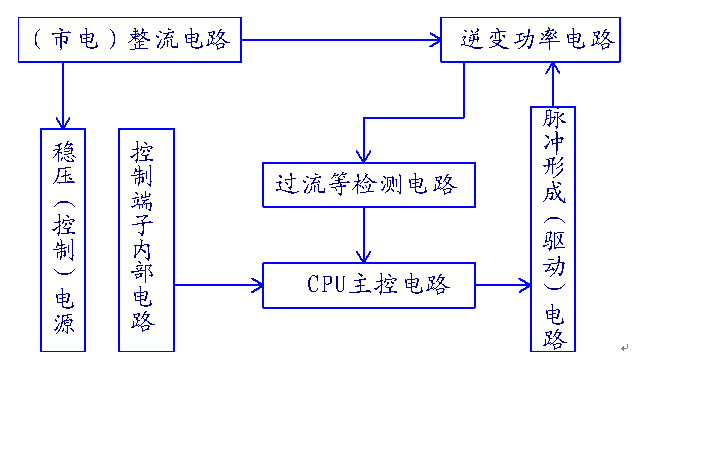
圖2-2 步進電動機驅動器的電路構成
步進電動機驅動器的電路構成如上圖。整流電路將輸出AC電源,整流濾波為直流電壓,提供穩壓電源的供電,并作為逆變功率電路的輸入電源。部分小功率步進電動機驅動器,直接取用外供直流電源,省去了整流電路這一環節。控制電路以單片機(CPU)為核心,接收輸入端子進入的控制信號,和過流檢測電路輸入的保護信號,輸出逆變電路所需的信號脈沖,并經脈沖驅動電路進行功率放大,驅動逆變功率電路的CMOS(或IGBT)功率開關管,使負載電動機產生相應步進動作。逆變功率電路,有些機型是由單管分立零件組成,有些則與整流電路等集成于一個功率模塊內部。
2)步進電動機驅動器與步進電動機和控制線路的連接
下圖2-3為兩相步進電機驅動器的接線圖,控制設備可以是PLC的輸出回路,也可以是其它電器設備。步進電機驅動器比較重要的控制信號有兩個:脈沖信號和方向信號。脈沖信號決定步進電動機的運轉速度,方向信號,決定步進電動機的旋轉方向。不僅僅是PLC,任何設備只要能給出這兩個控制信號,便能控制步進電機的步進、轉速和旋轉方向。從脈沖信號輸入腳輸入的是頻率可變的、脈沖個數可控的脈沖信號,這種信號可由純硬件電路或軟件程序生成;方向信號則為常規開關量信號。下面對步時電機驅動器的幾個控制信號及其它接線做一簡要的說明。

圖2-3 二相步進電機驅動器接線圖
a、脈沖信號輸入端(CP):由控制設備發送脈沖個數與頻率可變化的控制脈沖,控制步進電機的轉速,步進距離;信號要求為矩形脈沖,脈沖寬度不低于6-10μs,信號間隔大于6-10μs,低電平幅值0-1V,高電平幅值達4-6V。工作方式,一般為脈沖邊沿觸發,每輸入一個脈沖信號,電機轉過一個步距角(步進一次)。
b、方向信號輸入端(CW/CCW):輸入開關量電壓信號。端子開路狀態下,為靜態高電平,CP端子有脈沖信號輸入時,步進電機正轉;控制信號生效使方向輸入端為低電平時,在脈沖信號輸入期間,反轉。
注意:該端子控制回路,接通與斷開與否,步進電機都有可能運轉,只是運轉方向不同罷了。機型不同,對應正、反轉的電平值可能有所不同。如有的CW/CWW端子為高電平時,反轉。
這兩個控制端子一般為必接端子,即使只需一個轉向。接入方向控制的目的,在單轉向時,相當于啟/停信號。
c、脫機信號輸入端(FREE):FREE指通電運行前步時進電機的靜止力矩(鎖定轉子力矩)。一般步進驅動器,在脈沖信號無輸出時,仍輸出一靜態直流電壓,產生靜止力矩以鎖住轉子不動。而當有脫機信號時解除自鎖功能,轉子處于自由狀態并且不響應脈沖信號輸入。
在不斷電情況下,要手動調整轉子位置時,為步進驅動器輸入脫機信號,可使轉子解除鎖定狀態,進行手動操作或調節,調整完畢后,再解除脫機信號。
注意:有些步進驅動器,該端子定義為HOLD(勵磁控制信號輸入),端子接通狀態下,有轉子鎖定力矩產生,步進電機允許運行。端子開路狀態下,反而為脫機狀態。
d、故障信號輸出端(ERR):為開路集電極輸出或接點輸出方式,在過流、欠壓、過壓、電機連線接錯等故障發生時,步時驅動器停止輸出,同時發出故障報警信號。操作面板還有各種運行、故障指示燈,配合顯示步進驅動器的工作狀態。
e、輸出接線端(A+/A-/B+/B-)與步進電機的繞組引線對應相連接。改變電機轉向時,除改變CW/CCW端子信號外,也可以用改變輸出端子的方法來改變電機轉向,將A+、A-端子互調,便使步進電機的轉向改變。
f、供電電源端(AC80V或DC40V):直流供電時,可采用儀用開關電源,注意電流供給能力應大于步進電機的2倍;交流供電時,可采用220V/80V或380V/80V降壓變壓器,電流供給能力應大于步進電機的1.5倍以上。如果負載較輕,轉速也要求較低,而步進電機與驅動器的供電電壓范圍又寬,可以適當降低電源供電電壓,以延長電機和驅動器的壽命。
3、步進電動機驅動器檢修電路
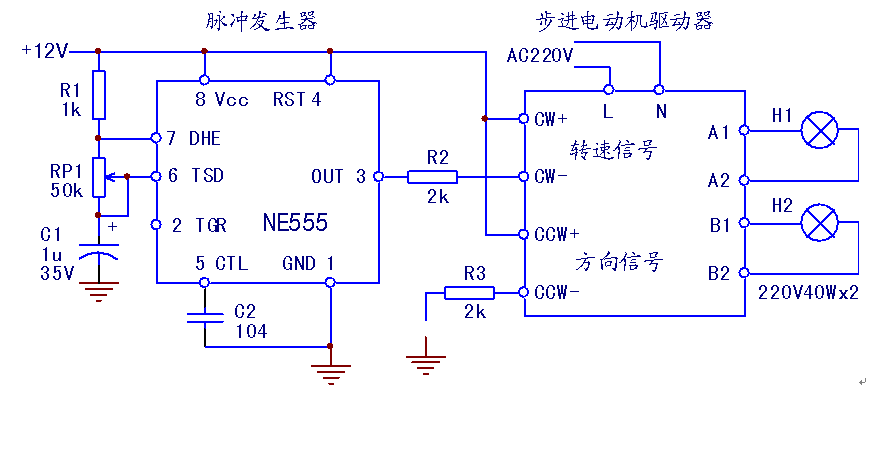
1-4 二相步進電動機驅動器的檢修電路
可以用NE555時基電路做一個簡單的振蕩器,作為步進電動機的脈沖調速信號。步進驅動器需要AC220V電源時,建議用隔離變壓器隔離后送入,以保障檢修過程中的人身安全;如手頭有步進電動機比較好,若無,可接入照明燈泡兩只,用作輸出指示,或直接用萬用表測量判斷輸出狀態;步進電動機的端子輸入信號回路(內部電路為光耦合器),需外供電源。一般要求為5V電壓級別。當信號回路的電壓高于5V時,需串接限流電阻,如上圖中串接的R2、R3電阻,以避免內部器件產生損壞。方向信號端子,可以空置,也可以接信號電源地,以試驗正轉和反轉控制信號是否有效;無脈沖發生器時,可為控制端子提供控制電源,如12V,將R2瞬時對地短接一次,步進電動機輸出端的燈光應該產生一次閃爍動作。步進驅動器上電后,因轉矩保持功能生效,兩只燈光均處于微亮狀態,有一定電壓輸出。轉速信號輸入時,燈泡的亮度上升,并且燈泡的閃爍頻率隨給定脈沖信號的變化而變化。變頻器維修 15515598858 網址:www.cntjjp.com.cn