硬件平臺控制的高精度機器人設備用于腦瘤手術
發布時間:2019-08-02 15:41:26來源:
挑戰:創建一個高精度的監督和控制系統,該系統能夠在微創神經外科中,安全地移動機器人。
解決方案:使用NI CompactRIO平臺開發一個安全的、統更合理、更靈活且更可靠的高性能機器人控制系統。
“由于CompactRIO硬件平臺及其靈活的編程環境,目前的解決方案比原來的原型設計更合理,可靠和有效率。”
機器人設備應用于醫療行業已有40多年,目前研究人員仍然在不斷致力于開發出更加有效、安全的醫用機器人。有的工作站由于環境惡劣等緣故而只能由機器人進行操作,相比于這些工業機器人,醫用機器人的工作必須與病人和醫務人員進行直接接觸。因此,醫療領域使用的機器人對安全性能的要求比工業領域更為復雜和嚴格。
這一挑戰對于神經外科表現尤為明顯——因為在手術中,需要要求極高的精確度來定位外科手術工具。機器人可以比比較有經驗的神經外科醫生實現更高的精確度和重復性。然而,他們不能對危險和突發事件作出及時和自主的響應。
神經外科觸覺設備
由于外科醫生不能將整個手術操作過程委托給一個機器人,因此比較佳的機器人解決方案由主/從工作方式來實現。外科醫生指定一個動作給機器人設備,然后機器人移動手術儀器進行精確定位。
由于這一主/從工作方式,外科醫生不能直接與儀器接觸,他們通過能重現人工手術操作中所有特有感覺的特殊傳感器,與手術操作過程保持一定程度的連接。這些被稱為觸覺設備的傳感器能在指令設備上重現力量感覺。該解決方案使機器人的工作安全狀況大大提高,因為機器人的所有動作都由外科醫生合理進行控制。
機電一體化與醫用機器人和觸覺主/從機器人系統協同工作已經超過10年,它也擔負起開發微創神經外科手術機器人應用控制系統的挑戰。在此應用中,手術工具是一個腫瘤病變治療的特殊設備,該設備被稱為光子放射外科系統—ZEISS(PRS)。
PRS系統是一個低能量X-射線微型源,從插入顱腔中的探針頭上發出輻射。PRS允許外科醫生對腫瘤病變限定輻射量,以避免輻射線與腦組織的正常良好區域接觸。這種治療方式是微創性治療,因為探頭從直徑只有3至7毫米大小的洞中穿過。就病人的腦損傷和后期手術恢復方面而言,微創性治療具有很大的優勢。
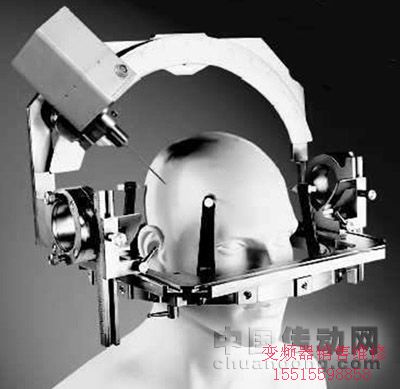
以前,外科醫生必須通過定位被稱為立體定向頭盔的金屬結構上的設備,進行PRS系統的手動控制(如圖1)。發射探頭通過齒條傳動穿過顱腔。金屬結構作為定位神經外科手術儀器的三維參考。然而,人工控制不能提供較高的定位精度,并且其功效在PRS系統應用中僅局限于并不多見的球形腫瘤。
【|中心,維修電話:15515598858 】