臺(tái)達(dá)變頻器在并列式連續(xù)拉絲機(jī)上的應(yīng)用
發(fā)布時(shí)間:2019-08-05 10:01:50來(lái)源:
臺(tái)達(dá)變頻器在并列式連續(xù)拉絲機(jī)上的應(yīng)用
1 引言
拉絲機(jī)是金屬線材加工中的重要設(shè)備,用于將金屬原材加工成各種規(guī)格線材。拉絲機(jī)由放線、拉絲、水冷、收線及排線等部分組成,其中電氣傳動(dòng)部份主要由放線電機(jī),收線電機(jī)及排線電機(jī)實(shí)現(xiàn),其生產(chǎn)質(zhì)量和效率對(duì)于企業(yè)來(lái)講至關(guān)重要。拉絲機(jī)可分為滑輪式、活套式、直線式三種。從產(chǎn)品終端來(lái)說(shuō),拉絲機(jī)可以分為大拉機(jī),中拉機(jī),小拉機(jī),微拉機(jī);而從拉絲機(jī)內(nèi)部控制方式和結(jié)構(gòu)來(lái)說(shuō),可以分為水箱式,滑輪式,直進(jìn)式等主要的幾種。對(duì)于不同要求,不同精度不同規(guī)格的產(chǎn)品,不同的金屬種類(lèi),可選擇不同規(guī)格的拉絲機(jī)械。對(duì)于銅鋁基材的電線電纜生產(chǎn)企業(yè),雙變頻控制的細(xì)拉機(jī)應(yīng)用比較廣泛,相對(duì)而言,其要求的控制性能也較低,而對(duì)于大部分鋼絲生產(chǎn)企業(yè),針對(duì)鋼材特性,其精度要求和拉拔穩(wěn)定度高,因此使用直進(jìn)式拉絲機(jī)較多,不同的拉絲機(jī)械,其工作過(guò)程基本相同:
放線:l 金屬絲的放線速度,對(duì)于整個(gè)拉絲機(jī)環(huán)節(jié)來(lái)說(shuō),其控制沒(méi)有過(guò)高精度要求,對(duì)部分雙變頻控制的拉絲機(jī)械,甚至可以利用拉絲環(huán)節(jié)的絲線張力通過(guò)圓盤(pán)拉伸。對(duì)大部分拉絲機(jī)械,放線的控制是通過(guò)變頻器驅(qū)動(dòng)放線機(jī)實(shí)現(xiàn)的。
拉絲:l 拉絲環(huán)節(jié)是拉絲機(jī)比較為重要的環(huán)節(jié)。不同金屬物料,不同的產(chǎn)品精度和要求,拉絲環(huán)節(jié)有很大的不同,雙變頻控制拉絲機(jī)拉絲部分與放線部分共用一臺(tái)電機(jī),金屬絲通過(guò)內(nèi)部塔輪的導(dǎo)引,經(jīng)過(guò)模具而逐步拉伸。而直進(jìn)式拉絲機(jī)拉伸效率較高,對(duì)每一道拉絲工序,都需要一臺(tái)電機(jī)帶動(dòng),因此其控制也比較為復(fù)雜。(歡迎來(lái)電咨詢(xún) 河南廣潤(rùn)自動(dòng)化設(shè)備有限公司 網(wǎng)址:www.cntjjp.com.cn 手機(jī):15515598858 )
收線:l 收線環(huán)節(jié)的工作速度決定了整個(gè)拉絲機(jī)械的生產(chǎn)效率。
2并列式連續(xù)拉絲機(jī)結(jié)構(gòu)
并列式連續(xù)拉絲機(jī)是一種用于拉拔金屬線材的直進(jìn)式連續(xù)拉絲機(jī),將組成一臺(tái)或兩臺(tái)連續(xù)拉絲機(jī)的所有單拉絲機(jī)按2~4列并排分布并以水平形式同時(shí)安置在一個(gè)帶有垂直平面的機(jī)架上,將所有的模盒裝置也設(shè)在機(jī)架上并使之與水平面成一定夾角,產(chǎn)品具有占地少、有利于提高勞動(dòng)生產(chǎn)率及實(shí)現(xiàn)衛(wèi)生和文明化生產(chǎn)。
本文以西安某公司生產(chǎn)的并列式拉絲機(jī)為設(shè)計(jì)案例。并列式連續(xù)拉絲機(jī)是平行排列成2-4列的直進(jìn)式連續(xù)拉絲機(jī),其傳動(dòng)、潤(rùn)滑、冷卻及控制與直立直進(jìn)式拉絲機(jī)相同。整機(jī)外觀圖示如圖1所示。

圖1 并列式拉絲機(jī)
本機(jī)器共有10個(gè)塔輪,1個(gè)牽引輪,1個(gè)收卷輪,11個(gè)模具,以及11根擺桿,比較大進(jìn)線直徑2.4mm,比較小出線直徑0.3mm,比較高線速度2.5m/s。塔輪直徑均為250mm,牽引輪直徑為360mm,收卷輪比較小直徑為280mm。原料線材通過(guò)11個(gè)模具的11級(jí)拉伸,變成需要線徑的成品線材。每個(gè)塔輪由1臺(tái)電機(jī)控制,牽引輪和收卷輪也分別由1臺(tái)電機(jī)控制。每臺(tái)塔輪配置擺桿一根,作為恒張力控制時(shí)使用。每臺(tái)電機(jī)都通過(guò)減速機(jī)與機(jī)械連接,減速比如下表1所示(減速比G為負(fù)載側(cè)齒輪/電機(jī)側(cè)齒輪)。整機(jī)結(jié)構(gòu)示意圖如圖2所示。
表1 減速機(jī)減速比
對(duì)應(yīng)電機(jī)位置 | 減速比G | 對(duì)應(yīng)電機(jī)位置 | 減速比G |
塔輪1 | 19.71 | 塔輪7 | 10.47 |
塔輪2 | 17.11 | 塔輪8 | 9.85 |
塔輪3 | 15.62 | 塔輪9 | 8.73 |
塔輪4 | 14.55 | 塔輪10 | 7.67 |
塔輪5 | 12.69 | 牽引輪 | 10.47 |
塔輪6 | 11.89 | 收卷輪 | 9.27 |
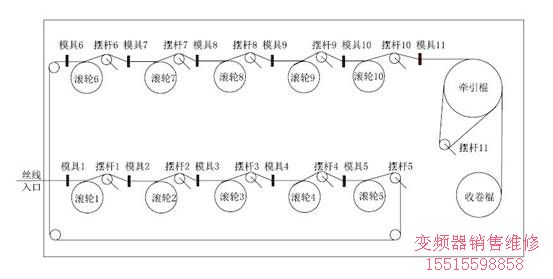
圖2 整機(jī)結(jié)構(gòu)示意
3 基于臺(tái)達(dá)BW系列變頻器的并列式拉絲機(jī)
3.1 控制原理(歡迎來(lái)電咨詢(xún) 河南廣潤(rùn)自動(dòng)化設(shè)備有限公司 網(wǎng)址:www.cntjjp.com.cn 手機(jī):15515598858 )
并列式拉絲機(jī)的變頻恒張力驅(qū)動(dòng)目的是為了保證在運(yùn)行過(guò)程中絲線的張力恒定。根據(jù)機(jī)械結(jié)構(gòu)和材料的不同,恒張力控制的方法一般分為兩種:1直接控制電機(jī)輸出轉(zhuǎn)矩,2通過(guò)控制速度恒定來(lái)保證張力的恒定。通過(guò)對(duì)機(jī)械結(jié)構(gòu)的分析,本項(xiàng)目采用通過(guò)控制速度的方法來(lái)間接控制張力的恒定。
由于并列式拉絲機(jī)由11組牽伸機(jī)構(gòu)和1組收卷機(jī)構(gòu)組成,所以我們單獨(dú)對(duì)一組牽伸機(jī)構(gòu)和一組收卷機(jī)構(gòu)來(lái)進(jìn)行控制原理的分析。圖3為一組牽伸機(jī)構(gòu)的結(jié)構(gòu)示意圖。
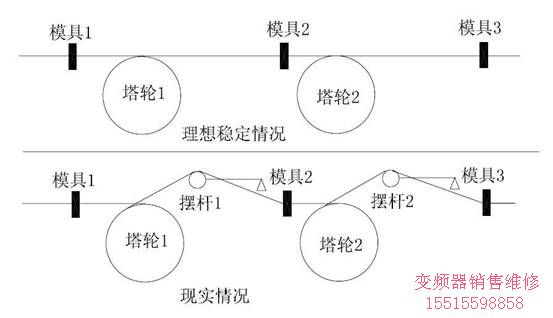
圖3 牽伸機(jī)構(gòu)的結(jié)構(gòu)
在運(yùn)行過(guò)程中保證擺桿處于設(shè)定的平衡位置不出現(xiàn)波動(dòng),就可以認(rèn)定牽伸過(guò)程中絲線上的張力是恒定的。所以我們可以將其控制分為兩個(gè)過(guò)程來(lái)進(jìn)行:穩(wěn)定過(guò)程和自調(diào)節(jié)過(guò)程。
穩(wěn)定運(yùn)行過(guò)程中,我們將條件理想化(排除其他不穩(wěn)定因素的影響),擺桿將停在設(shè)定的位置不出現(xiàn)波動(dòng),塔輪只需要按照計(jì)算出來(lái)的理論線速度運(yùn)行就可以保證絲線張力恒定,此過(guò)程只需要知道每級(jí)牽伸機(jī)構(gòu)中塔輪的理論線速度即可;由于機(jī)械一旦制造完成,塔輪的直徑以及電機(jī)端的減速比就已經(jīng)確定,從塔輪的理論線速度就可以計(jì)算出電機(jī)的實(shí)際運(yùn)行轉(zhuǎn)速,也就是變頻器需要運(yùn)行的頻率。
在運(yùn)行過(guò)程中會(huì)出現(xiàn)很多的不穩(wěn)定因素,例如絲線的打滑,機(jī)械摩擦力變化等原因,擺桿不可能固定不動(dòng),于是就需要變頻器對(duì)擺桿的變化做出響應(yīng),通過(guò)速度的變化來(lái)達(dá)到讓擺桿穩(wěn)定的目的,這個(gè)就是自調(diào)節(jié)的過(guò)程。通過(guò)變頻器對(duì)擺桿信號(hào)進(jìn)行PID的運(yùn)算,就可以達(dá)到這個(gè)目的。圖4為牽引驅(qū)動(dòng)機(jī)構(gòu)參數(shù)的詳細(xì)示意圖,讓我們看看圖中變量之間的關(guān)系。
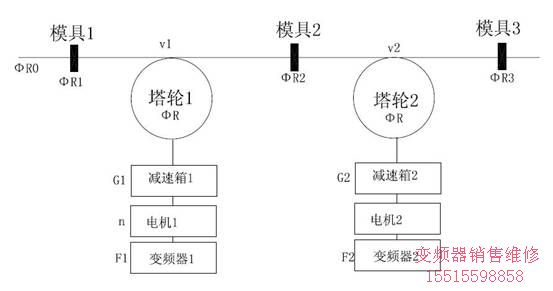
圖4 牽引驅(qū)動(dòng)參數(shù)
圖4中假設(shè)塔輪直徑為R,模具1直徑為R1,模具2直徑為R2,模具3直徑為R3,進(jìn)線直徑為R0,電機(jī)1減速齒輪比為G1,電機(jī)2減速齒輪比為G2,變頻器1指令頻率為F1,變頻器2指令頻率為F2,塔輪1上的線速度為v1,塔輪2上線速度為v2,n為電機(jī)1轉(zhuǎn)速,s為電機(jī)1轉(zhuǎn)差率,p為電機(jī)1級(jí)對(duì)數(shù),t為時(shí)間。G1定義為(負(fù)載側(cè)齒輪10-24/電機(jī)側(cè)齒輪10-23)。
牽伸機(jī)構(gòu)中,由于模具大小不一樣,根據(jù)單位時(shí)間內(nèi)通過(guò)模具的材料體積相等的前提條件,
我們知道:(R1/2)² *π *v1 *t = (R2/2)² *π * v2 *t
R1² * v1 = R2² * v2 …………………………①
由于R1,R2已知,根據(jù)v1就可以計(jì)算出v2。
而 v1 = π * R * n / G1, n = F1 * 60 * (1-s) / p
v1 = π * R * F1 * 60 * (1-s) / (G1 * p)
F1 = G1 * p * v1 / (60 * π * R * (1-s)) …………………………②
通過(guò)以上①②公式,就可以計(jì)算出每一級(jí)牽伸的理論線速度和理論頻率。
圖5為收卷機(jī)構(gòu)的結(jié)構(gòu)示意圖。
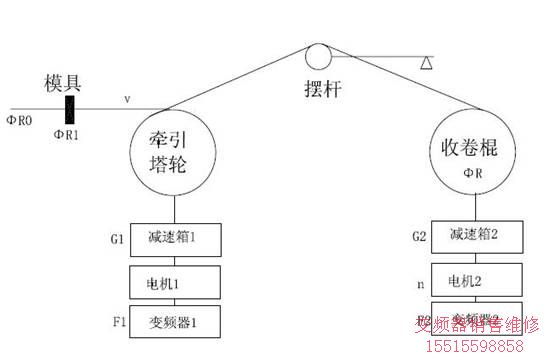
圖5 收卷機(jī)構(gòu)的結(jié)構(gòu)示意
收卷機(jī)構(gòu)的控制原理與牽伸機(jī)構(gòu)有兩點(diǎn)不同:1收卷機(jī)構(gòu)與牽引機(jī)構(gòu)的線速度是同一的;2收卷機(jī)構(gòu)中收卷棍的卷徑是會(huì)隨著電機(jī)運(yùn)轉(zhuǎn)而發(fā)生變化的,牽伸機(jī)構(gòu)中的卷徑是固定的。所以對(duì)于控制收卷棍的變頻器,還需要將R的變化考慮進(jìn)去,時(shí)時(shí)更新R值。原理公式同上式②。