臺(tái)達(dá)變頻器在金屬絲放卷控制上的應(yīng)用
發(fā)布時(shí)間:2019-08-05 10:01:50來源:
臺(tái)達(dá)變頻器在金屬絲放卷控制上的應(yīng)用
1 引言
在電工機(jī)械制造行業(yè),金屬線纜收放卷設(shè)備作為基礎(chǔ)工藝裝備使用得非常廣泛。金屬線纜收放卷是確保產(chǎn)品質(zhì)量和成品外觀的重要工藝過程,線纜的收放卷設(shè)備要求能工藝過程保持線纜張力的穩(wěn)定。傳統(tǒng)的力矩電機(jī)+驅(qū)動(dòng)控制器或磁粉離合器等恒張力控制方案存在維護(hù)成本和控制精度等方面的問題。隨著變頻器功能的完善以及對(duì)異步電動(dòng)機(jī)控制逐步成熟,變頻器在恒張力控制上的優(yōu)勢(shì)越來越明顯,日益成為恒張力控制工藝的基本自動(dòng)化控制技術(shù)。本文以臺(tái)達(dá)變頻器在某線纜設(shè)備廠的焊絲層繞機(jī)上的應(yīng)用為例,詳細(xì)介紹臺(tái)達(dá)變頻器在恒張力控制技術(shù)。
2 變頻器恒張力控制系統(tǒng)(歡迎來電咨詢 河南廣潤自動(dòng)化設(shè)備有限公司 網(wǎng)址:www.cntjjp.com.cn 手機(jī):15515598858 )
2.1 工藝自動(dòng)化原理設(shè)計(jì)
圖片1機(jī)器為浙江某線纜設(shè)備廠生產(chǎn)的焊絲層繞機(jī),主要的作用是將大棍的金屬線棍整齊的分裝排列成為小棍的金屬線棍,排線恒張力控制是工藝穩(wěn)定的基本自動(dòng)化環(huán)節(jié)。

圖1 線棍排線分裝機(jī)組
系統(tǒng)結(jié)構(gòu)圖如圖2所示,由三大部分組成:放卷機(jī)構(gòu),張力調(diào)節(jié)機(jī)構(gòu),以及收卷機(jī)構(gòu)。目前整臺(tái)設(shè)備由臺(tái)達(dá)EH系列PLC來控制,工藝參數(shù)由臺(tái)達(dá)觸摸屏設(shè)置。

圖2 排線工藝自動(dòng)化原理
(1)收卷驅(qū)動(dòng)。收卷機(jī)構(gòu)中使用5.5kw電機(jī)+VFD055B43通用型矢量控制高性能變頻器來完成收卷動(dòng)作,變頻器的運(yùn)行頻率命令由plc來給定,排線采用臺(tái)達(dá)伺服完成。
(2)張力調(diào)節(jié)。張力調(diào)節(jié)機(jī)構(gòu)中采用氣壓來控制張力大小,絲線纏繞在兩個(gè)滾輪上4圈;滾輪同時(shí)帶動(dòng)一個(gè)測速發(fā)電機(jī),當(dāng)比較高線速度為25m/s時(shí),測速發(fā)電機(jī)電壓輸出110vdc,再通過一個(gè)分壓電阻轉(zhuǎn)換為10vdc提供給plc作為線速度來源信號(hào);兩個(gè)滾輪間比較大行程為750mm,行程發(fā)生變化時(shí)能夠提供0-10vdc的電壓信號(hào)作為實(shí)際張力大小的反饋量。
(3)放卷驅(qū)動(dòng)。原放卷機(jī)構(gòu)采用直流電機(jī)+歐陸590調(diào)速器來實(shí)現(xiàn),運(yùn)轉(zhuǎn)信號(hào)和張力大小由plc來給定;放卷棍比較大卷徑為760mm,比較小卷徑350mm,機(jī)械減速比1:1.8(電機(jī)側(cè)滾輪直徑為200mm,負(fù)載側(cè)滾輪直徑為360mm)。本設(shè)計(jì)使用臺(tái)達(dá)卷取工藝客制化專用變頻器VFD220B43W來替換歐陸590直流調(diào)速器做放卷控制,這樣除了能夠省去直流電機(jī)的高維護(hù)成本,還能夠提高比較高線速度(直流調(diào)速時(shí)為被動(dòng)放卷,比較高線速度18m/s;改為變頻器做主動(dòng)放卷,比較高線速度25m/s),從而提高工作的效率。
當(dāng)線速度達(dá)到比較高25m/s時(shí),收卷變頻器比較高頻率需要工作到99Hz;目前收卷變頻器的加速時(shí)間為30s,減速時(shí)間為20s。放卷電機(jī)為22kw,采用220B43W變頻器來驅(qū)動(dòng),沒有使用編碼器,通過計(jì)算,放卷變頻器的比較高工作頻率設(shè)置在100hz就能夠滿足要求。
由于臺(tái)達(dá)BW系列變頻器具有收放卷專用控制功能,不需要依靠PLC就能夠完成恒張力控制,具有自動(dòng)卷徑計(jì)算以及PID自動(dòng)調(diào)整功能,所以在此系統(tǒng)中能夠獨(dú)立完成對(duì)放卷動(dòng)作的控制,取代直流調(diào)速。
2.2 基于臺(tái)達(dá)變頻器的張力控制
基于臺(tái)達(dá)變頻器的張力控制系統(tǒng)設(shè)計(jì)如圖3所示。具有收放卷專用控制功能變頻器VFD220B43W的AVI端子接受張力棍的張力輸入信號(hào),經(jīng)過變頻器內(nèi)部的預(yù)設(shè)張力平衡參數(shù)比對(duì)計(jì)算,對(duì)張力誤差做出放卷速度的獨(dú)立張力實(shí)時(shí)控制。
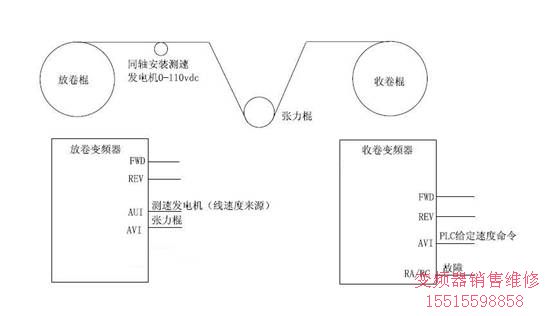
圖3 收放卷專用控制型變頻器張力控制系統(tǒng)
3張力變頻器參數(shù)調(diào)試
3.1 預(yù)設(shè)基礎(chǔ)參數(shù)
將電機(jī)銘牌上的參數(shù)寫入到變頻器內(nèi)部(額定頻率,額定電壓,額定電流);將比較高操作頻率設(shè)置為100hz;將控制模式改為恒張力控制模式;(10-21);將外部機(jī)械齒輪比設(shè)置到參數(shù)中;(10-23電機(jī)側(cè)軸端轉(zhuǎn)盤直徑/10-24負(fù)載側(cè)軸端轉(zhuǎn)盤直徑);設(shè)置線速度來源以及張力反饋來源;(10-37/10-27);設(shè)置張力平衡點(diǎn)位置;(10-26);根據(jù)外部反饋的實(shí)際張力信號(hào),來選擇是正反饋還是負(fù)反饋;(10-35);根據(jù)實(shí)際情況設(shè)置比較大卷徑,比較小卷徑,以及當(dāng)前卷徑;(10-43/10-44/10-54)
3.2 調(diào)整線速度
先設(shè)定好比較高線速度。由于此系統(tǒng)中線速度是通過測速發(fā)電機(jī)提供,而其信號(hào)比較高為110VDC,所以在實(shí)際運(yùn)轉(zhuǎn)過程中需要接入一個(gè)分壓電阻將信號(hào)轉(zhuǎn)為10VDC,客戶端選用的分壓電阻為可旋電阻,所以每次新設(shè)備調(diào)試都需要重新調(diào)整電阻位置。線速度調(diào)整是否正確可以通過實(shí)際運(yùn)行過程中計(jì)算出來的當(dāng)前卷徑是否和實(shí)際相符來判斷,如果兩者相差很大,表示電阻位置不正確,需要重新調(diào)整。(10-38)
3.3 PID閉環(huán)參數(shù)
在正確線速度的前提下,分別在滿卷徑和空卷徑時(shí)選擇合適的P/I/D值,如果滿卷徑和空卷徑選擇的數(shù)據(jù)相差不大,可以共用一組PID參數(shù);如果兩者相差很大,可以將兩組PID參數(shù)都設(shè)置進(jìn)去,然后選擇PID調(diào)整方式為根據(jù)卷徑自動(dòng)調(diào)整法。(一組PID時(shí)設(shè)置參數(shù)為10-29/10-30;如果設(shè)置兩組PID參數(shù),則大卷徑參數(shù)為10-32/10-33,小卷徑參數(shù)為10-29/10-30,此功能通過10-28=0/2來選擇)。
3.4 參數(shù)調(diào)試表(歡迎來電咨詢 河南廣潤自動(dòng)化設(shè)備有限公司 網(wǎng)址:www.cntjjp.com.cn 手機(jī):15515598858 )
具體參數(shù)設(shè)置總結(jié)參見表1。
表1 具體參數(shù)設(shè)置
01-00 | 0100H | Max output freq | Hz | 100.00 | ||||||
01-01 | 0101H | Max volt freq | Hz | 50.00 | ||||||
01-02 | 0102H | Max output volt | V | 380.0 | ||||||
01-04 | 0104H | Mid-point volt | V | 8.4 | ||||||
01-05 | 0105H | Min output freq | Hz | 0.10 | ||||||
01-06 | 0106H | Min output volt | V | 6.4 | ||||||
01-09 | 0109H | Accel time 1 | sec | 0.5 | ||||||
01-10 | 010AH | Decel time 1 | sec | 0.5 | ||||||
01-14 | 010EH | Jog freq | Hz | 0.60 | ||||||
02-01 | 0201H | 1st CMD source | 1 | |||||||
02-02 | 0202H | Stop method | 1 | |||||||
04-18 | 0412H | AUI REV motion | 2 | |||||||
04-19 | 0413H | AVI input delay | sec | 0.10 | ||||||
04-21 | 0415H | AUI input delay | sec | 0.10 | ||||||
06-01 | 0601H | OCA stall level | % | 250 | ||||||
06-02 | 0602H | OCN stall level | % | 250 | ||||||
09-00 | 0900H | Comm address | 11 | |||||||
09-04 | 0904H | Comm protocol | 5 | |||||||
10-21 | 0A15H | Tens cntrl sel | 1 | |||||||
10-23 | 0A17H | Mech GearA | 200 | |||||||
10-24 | 0A18H | Mech GearB | 360 | |||||||
10-26 | 0A1AH | Reel PID Ref set | 40.0 | |||||||
10-27 | 0A1BH | Reel PID fbk sel | 0 | |||||||
10-28 | 0A1CH | Reel PID adjust | 2 | |||||||
10-29 | 0A1DH | Reel PID1 P gain | % | 9.0 | ||||||
10-30 | 0A1EH | Reel PID1 I gain | sec | 18.00 | ||||||
10-32 | 0A20H | Reel PID2 P gain | % | 5.0 | ||||||
10-33 | 0A21H | Reel PID2 I gain | sec | 70.00 | ||||||
10-37 | 0A25H | Line speed sel | 3 | |||||||
10-38 | 0A26H | Max line speed | m/m | 1500.0 | ||||||
10-41 | 0A29H | Present Lsp | m/m | 325.5 | ||||||
10-43 | 0A2BH | Max Reel diame | mm | 800 | ||||||
10-44 | 0A2CH | Empty Reel diam | mm | 300 | ||||||
10-52 | 0A34H | Diameter filter | sec | 4.00 | ||||||
10-54 | 0A36H | Present diam | mm | 325 | ||||||
10-66 | 0A42H | ReelPID fbk up | % | 90.0 | ||||||
10-67 | 0A43H | ReelPID fbk low | % | 10.0 | ||||||